Sharon
Liu
Habitat's Airlock Linkage System
Automated Indoor Pest Control (AIPC) Robot with Air Quality Detection
Matician Innovation Challenge for 2030
For this project, I worked with a partner to design an automated indoor pest control robot (AIPCBot) that could be marketable to homeowners with pest problems in the year 2030 for the tech company Matician. We performed in-depth market and customer research for this problem, reaching the top 5 finalists in the competition. Since pest infestations remain a common issue especially in urban and low-income neighborhoods, we wanted a solution that would fit the innovative technical criteria for 2030. Home pest control currently involves utilizing company services which are timely and generally costly due to the necessity for frequent inspections and visits. Costs accumulate from each visit ranging from hundreds and up to a thousand dollars, and even more depending on the infestation’s severity. To combat this, we designed an automated indoor pest control system that implements a pest detection algorithm, inspects risk points in the home, verifies nesting areas, and uses a hands-free killing mechanism. To maintain a more lightweight and affordable robot for low-income homeowners, the robot is compact yet functional for easy maneuvering around rooms, while equipped with a sturdy robotic arm having multiple degrees of freedom to reach into cracks and tight areas. Attached to the arm would be a nozzle wired to the main body of the robot, which feeds refillable pesticide or rodenticide. Our challenge is to limit the health damages from this pesticide feature with an air purification unit by having a feature that detects air quality within homes during the aftereffect of pesticide usage.
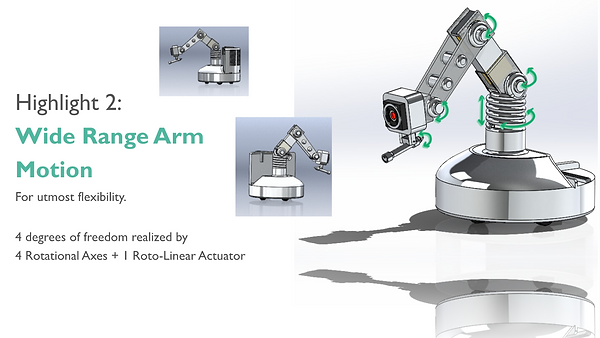
Robotic arm with nozzle rotation about the z-axis
Arm and nozzle rotational and linear motion along joints
Pesticide container with life lights and child safety lock
Detachable pesticide unit for cleaning and refilling purposes.
Detachable air filtration unit for cleaning and replacements.
Main Functional Highlights of Robotic Prototype Model

The design is compact, traverses omnidirectionally, maneuverable, and operable using a feedback loop to tell the robot to repeat certain actions. There is a nozzle hose pressure system for the pesticide distribution. Some common materials for the robotic exterior would be steel, which is much cheaper than other composite materials such as aluminum. The outer frame and robotic arm linkages can be manufactured using a metal laser cutter, but also with CNC machining to construct a geometrically more complex form that is more sturdy than preconditioned and simpler geometries.
Other functional highlights include a wide range of robotic arm movements. Hence, the robot uses a disk-shaped base for mobility around corners and tight spaces. The robotic arm is controlled with servos for rotational movements. The base of the arm is controlled with a roto-linear actuator for extending the arm. At the front is a camera module sensor, which senses nesting mounds and allows the robot to navigate the room.

Our design minimizes residue from pest control to runoff into the environment. The design implements a sensor which accurately detects air quality and includes a simple air filter feature which can purify the air using filtration from chemical particles and trap some of the smallest cockroach allergens. Additional ergonomic features include child safety locks along with rechargeable life lights which indicate the quantity of pesticide.
_edited.jpg)

Concept Sketches of Prototypes
Initial concept sketch with labeled modules and sensors
Final concept sketch with labeled modules and sensors
Block Diagram of the Key Features and Functions of AIPCBot

App Mockup and Software Features of AIPCBot App

The tracking feature of the robot incorporates an attribute similar to that of mass-market Roombas, which operates under the inclusion of a collision sensor, and a navigation algorithm augmented by vision-based means, called visual simultaneous location and mapping (VSLAM). The vision control aspect of nest identification would comprise generally of a vision-based control algorithm that can implement machine learning methods to track the x- and y- coordinates of the nesting locations, using mathematical feature data.
Furthermore, the air quality sensor, which detects the presence of air chemicals in and around the house, serves as a health hazard feature. The AIPCBot calibrates the air quality within the home over a certain period of time, and track the amount of impurities in the air to determine whether or not to operate the air filtration unit via the app.