Sharon
Liu
Habitat's Airlock Linkage System
Automated Guided Vehicle (AGV)
Computer Integrated Manufacturing, Spring 2018
For this project, I worked in a team of 4 to conceptualize and build an automated guided vehicle (AGV) robot equipped with line sensors, potentiometer, bump switch, ultrasonic sensor, and motor-powered wheels to navigate a curved path. The objective of this project was to become familiar with basic robotics and tampering with the concept of AGVs such as in manufacturing and warehouses. We designed and built the robot in Autodesk Inventor. Then, we built and wired the prototype. Finally, we wrote the code using the VEX software. The prototype was able to follow along a black curved path and stop when there was an object placed a few inches in front of it.

Front view of AGV, the frame is attached by hex bolts

Under view of AGV, the back wheels are powered by motors
Line sensing robot working principle diagram

CAD Drawing

Drawing file of the prototype in Autodesk Inventor
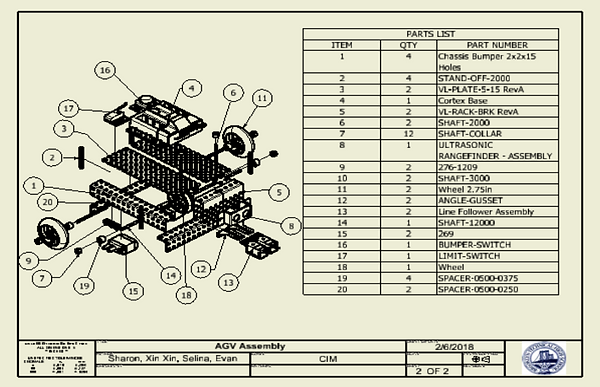
Bill of Materials of the prototype in Autodesk Inventor

Initial concept sketch of the prototype design
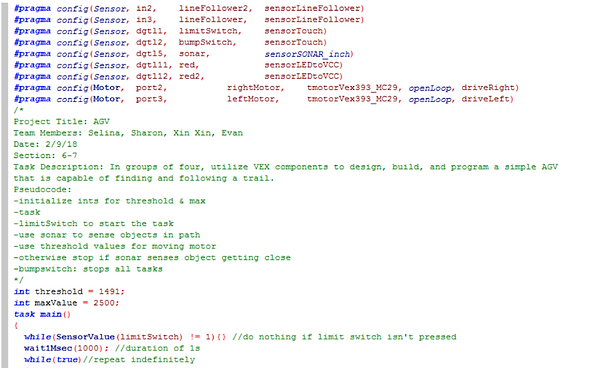
VEX code for robot motion